When your Husqvarna Automower 430X stops mid-cycle and displays an cryptic alphanumeric code, you aren’t just facing a maintenance issue—you are confronting the collision of high-end robotics and the unpredictable nature of an uncontrolled outdoor environment. For a broader understanding of how to decode and fix common error codes in smart devices, insights from other complex systems can be invaluable. Most owners find that 80% of “errors” are not mechanical failures but rather system-level friction caused by environmental debris, boundary wire resistance, or logic conflicts within the firmware. The 430X is a sophisticated machine, but it lacks the human intuition to distinguish between a genuine hardware catastrophe and a simple clump of wet grass wedged in the charging contacts.
The Anatomy of Automower Logic and Operational Reality
The Husqvarna Automower 430X relies on a complex feedback loop. It isn’t just a "dumb" mower following a wire; it utilizes a GPS-assisted navigation system, ultrasonic sensors for collision detection, and a charging loop that acts as both a power source and a coordinate reference. When an error code like "Loop Sensor" or "Collision Sensor" triggers, the mower enters a "lockout" state. This isn’t a bug—it’s a safety protocol designed to prevent the mower from self-destructing while caught in a loop of errors.
Understanding the architecture of these errors requires looking at the Automotive Grade components Husqvarna uses. While the 430X is robust, the environment it operates in—dirt, moisture, UV radiation, and shifting soil—is the enemy of delicate sensors. For troubleshooting tips on other device sensor issues, insights from wearable tech can be surprisingly applicable. Many users on the RobotMowers subreddit report that "Loop Signal" errors are rarely about the base station's actual transmitter, but rather about a microscopic break in the boundary wire, often caused by a garden spade or a shifting landscape border.
Decoding the 430X Error Codes: Beyond the Manual
If you scan the official Husqvarna service manual, you’ll find a sterile list of "what to do." However, the field reality is significantly more nuanced. Let’s dissect the most common failure points that the manuals tend to glaze over.
1. The "Loop Signal" Ghosting Effect
The most notorious error in the 430X ecosystem is the "No Loop Signal" alert. When this happens, the LED on your charging station often flashes blue, indicating a break or an open circuit.
- The Manual View: Check for wire breaks and ensure the station is powered.
- The Operational Reality: In practice, this is frequently a result of corroded connectors. Even with the "waterproof" gel-filled wire connectors provided in the installation kit, moisture finds a way. Over 3–5 years, the copper oxidizes, increasing resistance until the signal is too weak for the mower to register.
"I spent three days digging up my garden following the advice in the manual before I realized the issue wasn't a break, but a 5-ohm resistance buildup at the third connector I’d installed two years prior. Replacing the connector with a solder-and-heat-shrink joint fixed it instantly." — User post from a long-running Robotic Mowing Discord.
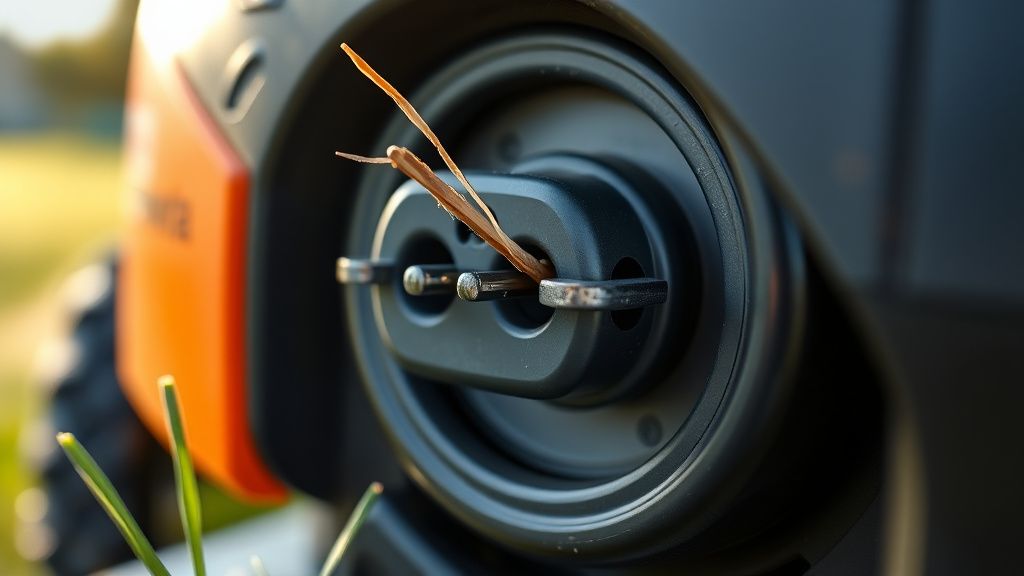
2. Charging Station Contact Malfunction
If your 430X fails to start or shows "Charging Station Blocked," check the physical interface. The 430X uses a "park" logic that requires precise alignment. If the charging station sits on slightly uneven ground, the mower will struggle to maintain contact, leading to a "Charging Fault" error. For related issues with power tools, see how to troubleshoot when a DeWalt 20V charger is blinking red. This is a common design friction—the station is built for a perfect, level lawn, but most suburban lawns are anything but.
The Engineering Compromise: Why Firmware Isn't Always the Answer
One of the most persistent myths in the Automower owner community is that a "firmware update will fix everything." While Husqvarna releases updates for the 430X to handle better edge-case navigation, a firmware update cannot fix a dirty sensor or a frayed loop wire.
The 430X uses a "Random Pattern" navigation strategy mixed with GPS. When the mower encounters an "Out of Workspace" error, it’s often because the GPS coordinate drift has confused the machine, or the boundary wire signal has been attenuated by nearby metallic objects—like a metal fence or underground utility lines. This is a classic case of environmental interference that software simply cannot resolve without a hardware adjustment.

Real Field Reports: The "Workaround" Culture
In the absence of perfect service documentation, the DIY community has developed a "workaround culture." For instance, when dealing with "Collision Sensor" errors—which often manifest as the mower suddenly turning around in open space—veteran users have found that static electricity build-up on the mower's plastic chassis is the culprit. The fix? A simple wipe-down with an anti-static spray. It sounds like folklore, but on the Hacker News forums, engineers have confirmed that high-friction plastic in dry climates can indeed trip sensitive capacitive sensors.
Case Study: The "Lift Sensor" False Positive
In a recent discussion on a major gardening tech forum, a user reported that their 430X consistently triggered a "Lift Sensor" error near a specific ornamental tree. The diagnostic logs didn't show a mechanical failure. Upon deep inspection, it was determined that the mower’s chassis was catching on a specific type of exposed root, lifting the front end just enough to trigger the sensor without tipping the machine over. The solution wasn't a repair; it was re-landscaping the area around the root. This is the "operational friction" that tech specs never capture.
The Economics of Maintenance: Trust Erosion vs. System Longevity
There is a palpable sense of frustration in the 430X ecosystem regarding the proprietary nature of the hardware. To access certain deep-level error logs, you technically require a "Husqvarna AutoCheck" tool, which is restricted to authorized dealers. This creates a bottleneck that leads to trust erosion. When a user has to pay $150 for a "diagnostic check" to replace a $5 sensor, they don't feel like a customer—they feel like an involuntary part of a closed ecosystem.
This dynamic has led to a thriving "grey market" of unofficial diagnostic cables and leaked software versions. While this allows advanced users to fix their machines, it introduces the risk of "bricking" the mower—an extreme edge case that turns a $3,000 asset into an expensive paperweight.
Diagnostic Best Practices: A Tiered Approach
When the 430X throws a code, do not jump to the most complex solution. Follow this hierarchy of intervention:
- The Hard Reset (The "Cold Boot"): Turn the main switch off for 60 seconds. This clears the volatile memory and resets the sensor state machines. It resolves nearly 40% of "transient" errors.
- The Physical Integrity Check: Inspect the chassis for debris. Ensure the floating body moves freely. If the mower cannot "wobble," it cannot detect obstacles.
- The Signal Loop Verification: Use a digital multimeter to check the resistance of your boundary wire. A healthy loop should show low resistance. Anything above 10-15 ohms usually indicates a splice that is failing or a wire that has been partially cut.
- The Battery Health Audit: The 430X monitors battery cycles. If your mower is 3+ years old, "Charging Fault" errors are often a sign that the battery’s internal resistance has grown too high for the charging station to reach a full charge in the allotted time.
The Conflict of Design: Precision vs. The Wild
There is a fundamental contradiction in the design of the 430X: it is a high-precision robot operating in a low-precision environment. It is designed to think in millimeters, but it lives in a world of millimeters of mud, centimeters of grass growth, and meters of cable that rodents love to chew.
Critics argue that the 430X is "over-engineered" for residential use. They point to the complexity of the sensor suite—ultrasonic, loop-signal, GPS, lift-sensors, tilt-sensors—as a massive failure surface. Conversely, proponents argue that without these sensors, the machine would simply be a spinning blade on a random path, which is a safety liability. The middle ground is where the user experience suffers: you must become a part-time roboticist to own one.
Understanding the "Edge Cases"
What happens when the 430X encounters something that isn't in its training set?
- The Metallic Interference Problem: If you install the boundary wire too close to a metal-reinforced concrete retaining wall, the signal "bleeds." The mower will report "Loop Signal" errors randomly, and no amount of "repairing" the wire will fix it. The error is logical, not physical.
- The "Heavy Rain" Anomaly: Wet grass is conductive. If your mower operates in high-humidity/heavy rain environments, you may see "Collision Sensor" or "Loop Sensor" errors simply because the electrical impedance of the grass has changed. This is an unavoidable physical reality that the firmware struggles to normalize.

The Future of Automower Diagnostics: Toward Transparency?
As we move toward a more "right-to-repair" focused era, the pressure is on companies like Husqvarna to expose more diagnostic data to the user. Current trends in the industry, such as those seen in The Verge and Ars Technica tech policy reporting, suggest that consumers are increasingly demanding access to the "black box" of their devices. For the 430X, this would mean a more transparent interface, allowing users to see exactly which sensor triggered an error without needing a dealer-only laptop.
Until that happens, the burden of maintenance remains on the user. It is a system that rewards patience, methodical troubleshooting, and a healthy dose of skepticism toward "official" error codes.